 이 누리집은 대한민국 공식 전자정부 누리집입니다.
이 누리집은 대한민국 공식 전자정부 누리집입니다.

- 게시일
- 2024.09.03
한국기계연구원, '바위 넘고 계단 오르는 바퀴' 세계 최초 개발
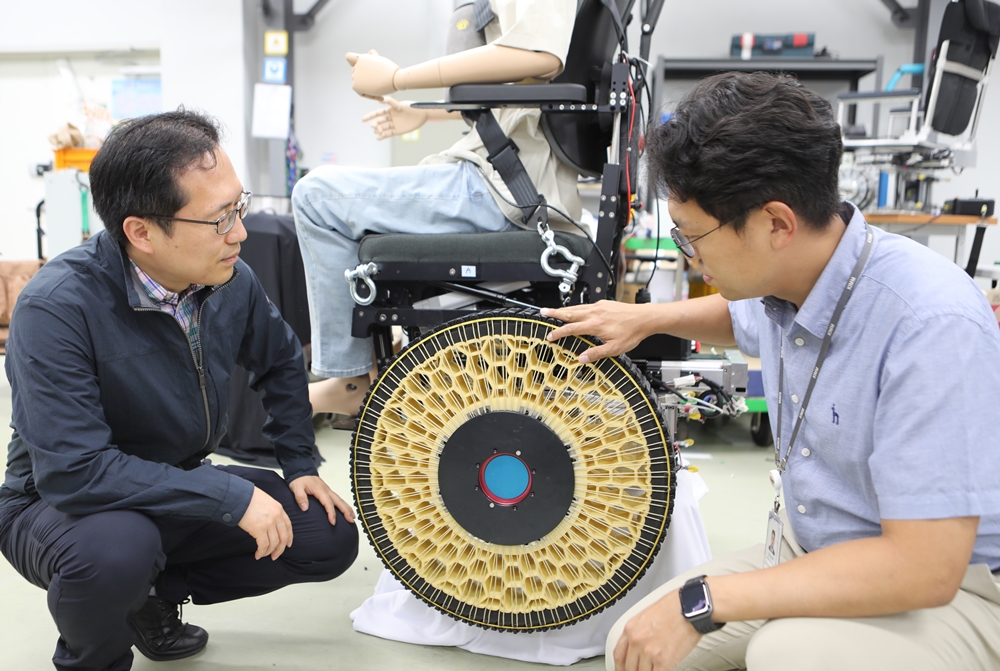
▲ 한국기계연구원 AI로봇연구소 첨단로봇연구센터의 송성혁 책임연구원(오른쪽)과 박동일 센터장이 모핑 휠이 장착된 휠체어를 살펴보고 있다.
샤를 오두앙 기자 caudouin@korea.kr
사진 = 한국기계연구원
계단이나 바위같이 일상생활의 다양한 장애물을 극복할 수 있는 바퀴(휠)와 이동체 로봇 기술이 한국 연구진에 의해 개발됐다.
한국기계연구원(기계연)은 2일 액체 방울의 표면장력 원리를 모사해 강성이 자유롭게 변하는 모핑 휠을 세계 최초로 개발하고 실제 이동체에 적용하는 데 성공했다고 밝혔다.
기계연 AI로봇연구소 첨단로봇연구센터의 박동일 센터장과 송성혁 책임연구원이 이끄는 팀이 개발한 모핑 휠은 복잡한 기계 장치나 센서 없이 강성을 쉽게 바꿀 수 있는 바퀴 및 모듈화 시스템이다.
기존 기술은 평지 주행 시에도 휠에 지속적인 큰 변형이 발생해 주행 효율과 안정성이 낮고 소음도 커지는 한계가 있었다. 연구팀이 개발한 휠은 강성을 원하는 대로 조절할 수 있어 평지 고속 주행 시에는 일반적인 휠과 동일한 강성을 유지하다가 장애물이 있는 경우에만 실시간으로 휠을 말랑하게 바꿔 장애물을 극복할 수 있도록 했다.
연구팀은 지난해 10월 모핑 휠의 메커니즘 검증을 완료하고 최근 바위나 18cm 높이의 계단을 극복할 수 있는 투휠 휠체어 등 다양한 이동체에 손쉽게 적용할 수 있는 모듈화 기술도 개발했다.
연구팀은 "이번에 개발한 모핑 휠은 기존 휠의 장점인 높은 이동 효율은 유지하면서 휠의 한계점이었던 장애물 극복까지 구현이 가능하다는 점에서 의의가 있다"며 "향후 장애물 극복이 가능한 휠체어 및 다양한 이동 로봇, 탑승형 운송 수단 등 광범위하게 활용할 것으로 기대된다"고 밝혔다.
한편, 이번 연구는 로봇 전문 학술지 '사이언스 로보틱스' 8월호의 표지 논문으로 게재됐다.
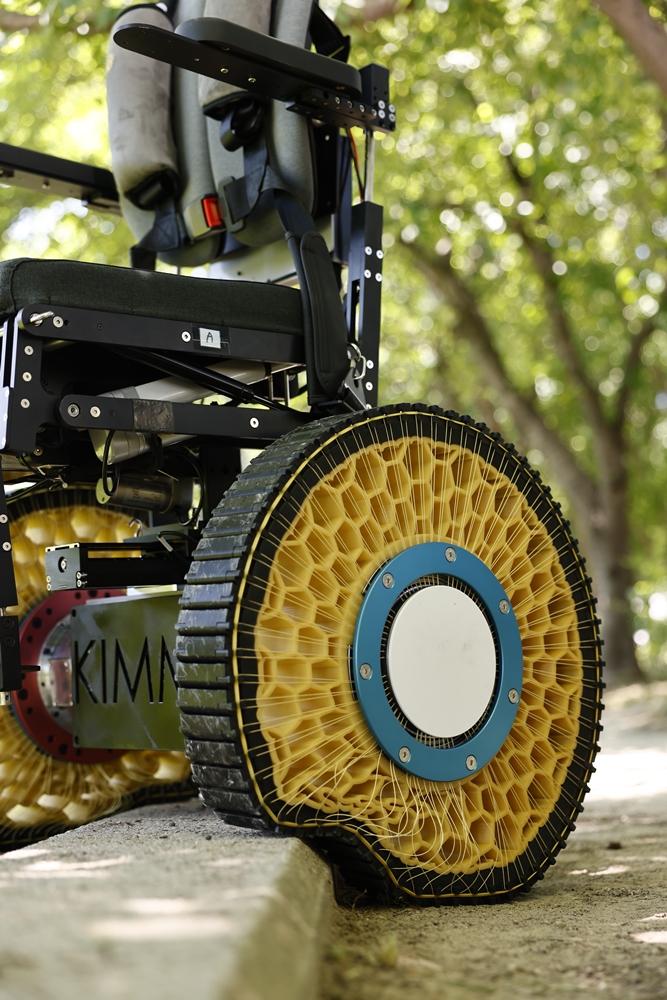
▲ 도로 장애물에 따라 바퀴 모양이 바뀌는 모핑 휠이 장착된 휠체어가 장애물을 넘어가는 모습.
· 코리아넷 뉴스의 저작권 정책은 코리아넷(02-2125-3501)으로 문의하여 주시기 바랍니다.